6

CHAPTER OUTLINE
6.1 What is Learning?
6.2 Classical Conditioning
6.3 Operant Conditioning
6.4 Observational Learning (Modeling)
Not far down this same beach, Ben and his son, Julian, paddle out into the ocean on surfboards. A wave approaches. Julian crouches on his board, then jumps up and rides the wave for a few seconds before losing his balance. He emerges from the water in time to watch his father ride the face of the wave.
Unlike baby sea turtles, which know how to find the ocean and swim with no help from their parents, we are not born knowing how to swim (or surf). Yet we humans pride ourselves on our ability to learn. In fact, over thousands of years and across cultures, we have created institutions devoted entirely to learning. But have you ever asked yourself how exactly it is that we learn? What processes are at work as we come to know what we know? This chapter focuses on the primary ways in which learning occurs.
6.1 What is Learning?
LEARNING OBJECTIVES
By the end of this section , you will be able to:
- Explain how learned behaviors are different from instincts and reflexes
- Define learning
- Recognize and define three basic forms of learning—classical conditioning, operant conditioning, and observational learning
While many behaviors are learned, a part of the behavioral repertoire consists of unlearned behaviors, such as instincts and reflexes. Both instincts and reflexes are inborn (i.e., unlearned) behaviors that are triggered, or elicited, by environmental events called stimuli. These behaviors help an organism adapt to its environment. For example, every healthy human baby is born with a sucking reflex. A baby knows how to suck on a nipple, whether artificial (from a bottle) or human. Nobody teaches the baby to suck, just as a bear is not taught to hibernate.
Unlike innate behaviors, learned behaviors involve acquiring knowledge and skills through experience. Learning is defined as a relatively permanent change in behavior or knowledge that results from a complex interaction between behavior and the environment. Looking back at our surfing scenario, Julian will have to spend much more time training with his surfboard before he learns how to ride the waves like his father.
In classical conditioning, also known as Pavlovian conditioning, organisms learn to associate events, or stimuli, that repeatedly happen together. We experience this process throughout our daily lives. For example, you might see a flash of lightning in the sky during a storm and then hear a loud boom of thunder. The sound of the thunder naturally makes you jump (loud noises have that effect by reflex). Because lightning reliably predicts the impending boom of thunder, you may associate the two and jump when you see lightning. Psychological researchers study this associative process by focusing on what can be seen and measured—behaviors. Researchers ask if one stimulus triggers a response, can we train a different stimulus to trigger that same response?
In operant conditioning, organisms learn, again, to associate events—a behavior and its consequence (reinforcement or punishment). A pleasant consequence encourages more of that behavior in the future, whereas a punishment deters the behavior. Imagine you are teaching your dog, Hodor, to sit. You tell Hodor to sit and give him a treat when he does. After repeated experiences, Hodor begins to associate the act of sitting with receiving a treat. He learns that the consequence of sitting is that he gets a doggie biscuit (Figure 6.2). Conversely, if the dog is punished when exhibiting a behavior, it becomes conditioned to avoid that behavior (e.g., receiving a small shock when crossing the boundary of an invisible electric fence).

All of the approaches covered in this chapter are part of a particular tradition in psychology, called behaviorism, which we discuss in the next section. However, these approaches do not represent the entire study of learning. Separate traditions of learning have taken shape within different fields of psychology, such as memory and cognition, so you will find that other chapters will round out your understanding of the topic. Over time these traditions tend to converge. For example, in this chapter, you will see how cognition has come to play a larger role in behaviorism, whose more extreme adherents once insisted that behaviors are triggered by the environment with no intervening thought.
6.1 TEST YOURSELF
Summary: 6.1 What is Learning?
Instincts and reflexes are innate behaviors—they occur naturally and do not involve learning. In contrast, learning is a change in behavior or knowledge that results from experience. There are three main types of learning: classical conditioning, operant conditioning, and observational learning. Both classical and operant conditioning are forms of associative learning where associations are made between events that occur together. Observational learning is just as it sounds: learning by observing others.
6.2 Classical Conditioning
LEARNING OBJECTIVES
- Explain how classical conditioning occurs
- Summarize the processes of acquisition, extinction, spontaneous recovery, generalization, and discrimination
Pavlov (1849–1936), a Russian scientist, performed extensive research on dogs and is best known for his experiments in classical conditioning (Figure 6.3). As we discussed briefly in the previous section, classical conditioning is a process by which we learn to associate stimuli and, consequently, to anticipate events.
These unusual responses intrigued Pavlov, and he wondered what accounted for what he called the dogs’ “psychic secretions” (Pavlov, 1927). To explore this phenomenon in an objective manner, Pavlov designed a series of carefully controlled experiments to see which stimuli would cause the dogs to salivate. He was able to train the dogs to salivate in response to stimuli that clearly had nothing to do with food, such as the sound of a bell, a light, and a touch on the leg. Through his experiments, Pavlov realized that an organism has two types of reflexes: 1) unconditioned (not learned or innate) reflexes and 2) conditioned (learned) reflexes.
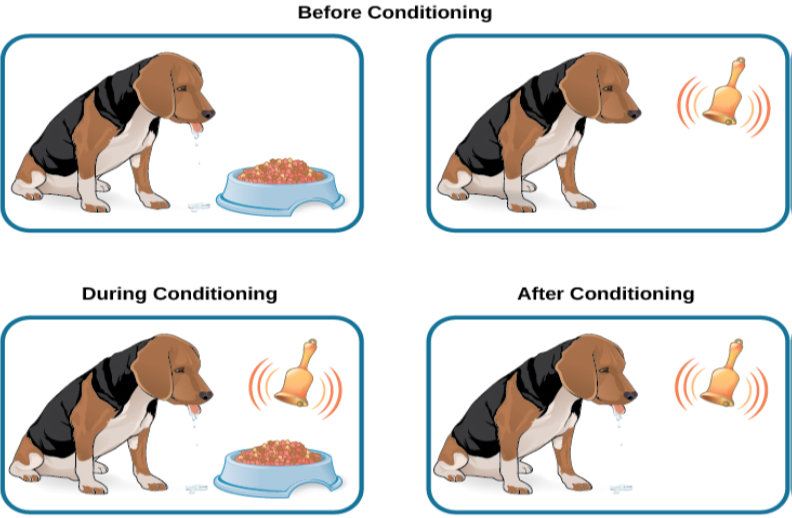
Pavlov’s classical conditioning experiments consisted of three stages: Before Conditioning, During Conditioning, and After Conditioning. (Figure 6.4).
Before Conditioning: Meat powder (UCS) → Salivation (UCR)
Classical Conditioning and Higher-Order Conditioning
How does classical conditioning work in the real world? Consider the case of Moisha, who was diagnosed with cancer. When she received her first chemotherapy treatment, she vomited shortly after the chemicals were injected. In fact, every trip to the doctor for chemotherapy treatment shortly after the drugs were injected, she vomited. Moisha’s treatment was a success and her cancer went into remission. Now, when she visits her oncologist’s office every 6 months for a check-up, she becomes nauseous. In this case, the chemotherapy drugs are the unconditioned stimulus (UCS), vomiting is the unconditioned response (UCR), the doctor’s office is the conditioned stimulus (CS) after being paired with the UCS, and nausea is the conditioned response (CR). Let’s assume that the chemotherapy drugs that Moisha takes are given through a syringe injection. After entering the doctor’s office, Moisha sees a syringe, and then gets her medication. In addition to the doctor’s office, Moisha will learn to associate the syringe will the medication and will respond to syringes with nausea. This is an example of higher-order (or second-order) conditioning, when the conditioned stimulus (the doctor’s office) serves to condition another stimulus (the syringe). It is hard to achieve anything above second-order conditioning. For example, if someone rang a bell every time Moisha received a syringe injection of chemotherapy drugs in the doctor’s office, Moisha likely will never get sick in response to the bell.
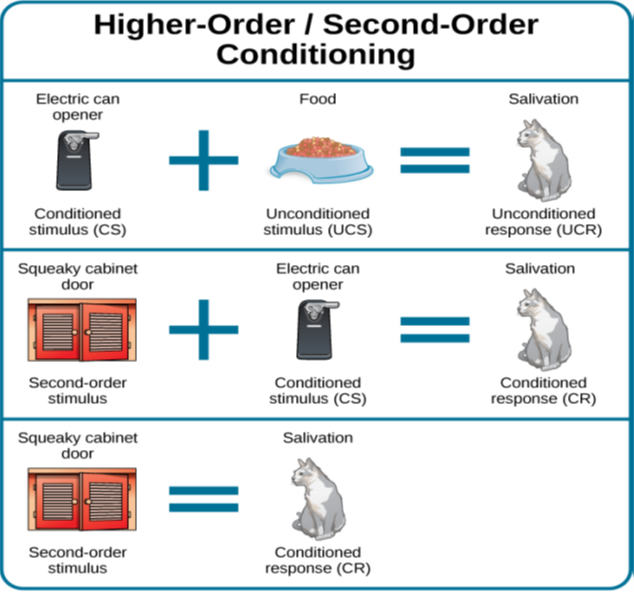
Consider another example of classical conditioning. Let’s say you have a cat named Tiger, who is quite spoiled. You keep her food in a separate cabinet, and you also have a special electric can opener that you use only to open cans of cat food. For every meal, Tiger hears the distinctive sound of the electric can opener (“zzhzhz”) and then gets her food. Tiger quickly learns that when she hears “zzhzhz” she is about to get fed. What do you think Tiger does when she hears the electric can opener? She will likely get excited and run to where you are preparing her food. This is an example of classical conditioning. In this case, what are the UCS, CS, UCR, and CR?
What if the cabinet holding Tiger’s food becomes squeaky? In that case, Tiger hears “squeak” (the cabinet), “zzhzhz” (the electric can opener), and then she gets her food. Tiger will learn to get excited when she hears the “squeak” of the cabinet. Pairing a new neutral stimulus (“squeak”) with the conditioned stimulus (“zzhzhz”) is called higher-order conditioning, or second-order conditioning. This means you are using the conditioned stimulus of the can opener to condition another stimulus: the squeaky cabinet (Figure 6.5). It is hard to achieve anything above second-order conditioning. For example, if you ring a bell, open the cabinet (“squeak”), use the can opener (“zzhzhz”), and then feed Tiger, Tiger will likely never get excited when hearing the bell alone.
EVERYDAY CONNECTION
Classical Conditioning at Stingray City
Kate and her spouse recently vacationed in the Cayman Islands, and booked a boat tour to Stingray City, where they could feed and swim with the southern stingrays. The boat captain explained how the normally solitary stingrays have become accustomed to interacting with humans. About 40 years ago, fishermen began to clean fish and conch (unconditioned stimulus) at a particular sandbar near a barrier reef, and large numbers of stingrays would swim in to eat (unconditioned response) what the fishermen threw into the water; this continued for years. By the late 1980s, word of the large group of stingrays spread among scuba divers, who then started feeding them by hand. Over time, the southern stingrays in the area were classically conditioned much like Pavlov’s dogs. When they hear the sound of a boat engine (neutral stimulus that becomes a conditioned stimulus), they know that they will get to eat (conditioned response).
As soon as they reached Stingray City, over two dozen stingrays surrounded their tour boat. The couple slipped into the water with bags of squid, the stingrays’ favorite treat. The swarm of stingrays bumped and rubbed up against their legs like hungry cats (Figure 6.6). Kate was able to feed, pet, and even kiss (for luck) these amazing creatures. Then all the squid was gone, and so were the stingrays.

So far, all of the examples have involved food, but classical conditioning extends beyond the basic need to be fed. Consider our earlier example of a dog whose owners install an invisible electric dog fence. A small electrical shock (unconditioned stimulus) elicits discomfort (unconditioned response). When the unconditioned stimulus (shock) is paired with a neutral stimulus (the edge of a yard), the dog associates the discomfort (unconditioned response) with the edge of the yard (conditioned stimulus) and stays within the set boundaries. In this example, the edge of the yard elicits fear and anxiety in the dog. Fear and anxiety are the conditioned response.
General Processes in Classical Conditioning
Now that you know how classical conditioning works and have seen several examples, let’s take a look at some of the general processes involved. In classical conditioning, the initial period of learning is known as acquisition, when an organism learns to associate a neutral stimulus and an unconditioned stimulus. During acquisition, the neutral stimulus begins to elicit the conditioned response, and eventually the neutral stimulus becomes a conditioned stimulus capable of eliciting the conditioned response by itself. Timing is important for conditioning to occur. Typically, there should only be a brief interval between presentation of the conditioned stimulus and the unconditioned stimulus. Depending on what is being conditioned, sometimes this interval is as little as five seconds (Chance, 2009). However, with other types of conditioning, the interval can be up to several hours.
Taste aversion is a type of conditioning in which an interval of several hours may pass between the conditioned stimulus (something ingested) and the unconditioned stimulus (nausea or illness). Here’s how it works. Between classes, you and a friend grab a quick lunch from a food cart on campus. You share a dish of chicken curry and head off to your next class. A few hours later, you feel nauseous and become ill. Although your friend is fine and you determine that you have intestinal flu (the food is not the culprit), you’ve developed a taste aversion; the next time you are at a restaurant and someone orders curry, you immediately feel ill. While the chicken dish is not what made you sick, you are experiencing taste aversion: you’ve been conditioned to be averse to a food after a single, bad experience.
How does this occur—conditioning based on a single instance and involving an extended time lapse between the event and the negative stimulus? Research into taste aversion suggests that this response may be an evolutionary adaptation designed to help organisms quickly learn to avoid harmful foods (Garcia & Rusiniak, 1980; Garcia & Koelling, 1966). Not only may this contribute to species survival via natural selection, but it may also help us develop strategies for challenges such as helping cancer patients through the nausea induced by certain treatments (Holmes, 1993; Jacobsen et al., 1993; Hutton, Baracos, & Wismer, 2007; Skolin et al., 2006). Garcia and Koelling (1966) showed not only that taste aversions could be conditioned, but also that there were biological constraints to learning. In their study, separate groups of rats were conditioned to associate either a flavor with illness, or lights and sounds with illness. Results showed that all rats exposed to flavor-illness pairings learned to avoid the flavor, but none of the rats exposed to lights and sounds with illness learned to avoid lights or sounds. This added evidence to the idea that classical conditioning could contribute to species survival by helping organisms learn to avoid stimuli that posed real dangers to health and welfare.
Robert Rescorla demonstrated how powerfully an organism can learn to predict the UCS from the CS. Take, for example, the following two situations. Ari’s dad always has dinner on the table every day at 6:00. Soraya’s mom switches it up so that some days they eat dinner at 6:00, some days they eat at 5:00, and other days they eat at 7:00. For Ari, 6:00 reliably and consistently predicts dinner, so Ari will likely start feeling hungry every day right before 6:00, even if he’s had a late snack. Soraya, on the other hand, will be less likely to associate 6:00 with dinner, since 6:00 does not always predict that dinner is coming. Rescorla, along with his colleague at Yale University, Alan Wagner, developed a mathematical formula that could be used to calculate the probability that an association would be learned given the ability of a conditioned stimulus to predict the occurrence of an unconditioned stimulus and other factors; today this is known as the Rescorla-Wagner model (Rescorla & Wagner, 1972)
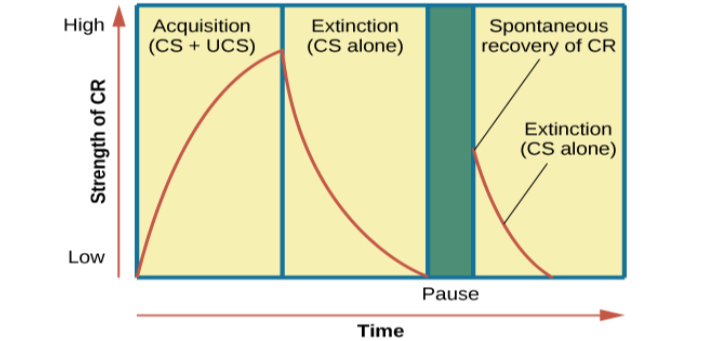
Once we have established the connection between the unconditioned stimulus and the conditioned stimulus, how do we break that connection and get the dog, cat, or child to stop responding? In Tiger’s case, imagine what would happen if you stopped using the electric can opener for her food and began to use it only for human food. Now, Tiger would hear the can opener, but she would not get food. In classical conditioning terms, you would be giving the conditioned stimulus, but not the unconditioned stimulus. Pavlov explored this scenario in his experiments with dogs: sounding the tone without giving the dogs the meat powder. Soon the dogs stopped responding to the tone. Extinction is the decrease in the conditioned response when the unconditioned stimulus is no longer presented with the conditioned stimulus. When presented with the conditioned stimulus alone, the dog, cat, or other organism would show a weaker and weaker response, and finally no response. In classical conditioning terms, there is a gradual weakening and disappearance of the conditioned response.
What happens when learning is not used for a while—when what was learned lies dormant? As we just discussed, Pavlov found that when he repeatedly presented the bell (conditioned stimulus) without the meat powder (unconditioned stimulus), extinction occurred; the dogs stopped salivating to the bell. However, after a couple of hours of resting from this extinction training, the dogs again began to salivate when Pavlov rang the bell. What do you think would happen with Tiger’s behavior if your electric can opener broke, and you did not use it for several months? When you finally got it fixed and started using it to open Tiger’s food again, Tiger would remember the association between the can opener and her food—she would get excited and run to the kitchen when she heard the sound. The behavior of Pavlov’s dogs and Tiger illustrates a concept Pavlov called spontaneous recovery: the return of a previously extinguished conditioned response following a rest period (Figure 6.7).
Acquisition and extinction involve the strengthening and weakening, respectively, of a learned association. Two other learning processes—stimulus discrimination and stimulus generalization—are involved in determining which stimuli will trigger learned responses. Animals (including humans) need to distinguish between stimuli—for example, between sounds that predict a threatening event and sounds that do not—so that they can respond appropriately (such as running away if the sound is threatening). When an organism learns to respond differently to various stimuli that are similar, it is called stimulus discrimination. In classical conditioning terms, the organism demonstrates the conditioned response only to the conditioned stimulus. Pavlov’s dogs discriminated between the basic tone that sounded before they were fed and other tones (e.g., the doorbell), because the other sounds did not predict the arrival of food. Similarly, Tiger, the cat, discriminated between the sound of the can opener and the sound of the electric mixer. When the electric mixer is going, Tiger is not about to be fed, so she does not come running to the kitchen looking for food. In our other example, Moisha, the cancer patient, discriminated between oncologists and other types of doctors. She learned not to feel ill when visiting doctors for other types of appointments, such as her annual physical.
On the other hand, when an organism demonstrates the conditioned response to stimuli that are similar to the condition stimulus, it is called stimulus generalization, the opposite of stimulus discrimination. The more similar a stimulus is to the condition stimulus, the more likely the organism is to give the conditioned response. For instance, if the electric mixer sounds very similar to the electric can opener, Tiger may come running after hearing its sound. But if you do not feed her following the electric mixer sound, and you continue to feed her consistently after the electric can opener sound, she will quickly learn to discriminate between the two sounds (provided they are sufficiently dissimilar that she can tell them apart). In our other example, Moisha continued to feel ill whenever visiting other oncologists or other doctors in the same building as her oncologist.
Behaviorism
John B. Watson, shown in Figure 6.8, is considered the founder of behaviorism. Behaviorism is a school of thought that arose during the first part of the 20th century, which incorporates elements of Pavlov’s classical conditioning (Hunt, 2007). In stark contrast with Freud, who considered the reasons for behavior to be hidden in the unconscious, Watson championed the idea that all behavior can be studied as a simple stimulus-response reaction, without regard for internal processes. Watson argued that in order for psychology to become a legitimate science, it must shift its concern away from internal mental processes because mental processes cannot be seen or measured. Instead, he asserted that psychology must focus on outward observable behavior that can be measured.
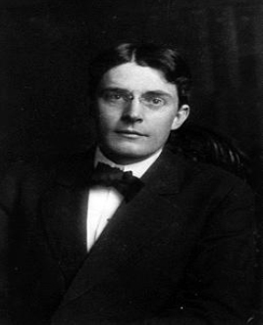
In 1920, Watson was the chair of the psychology department at Johns Hopkins University. Through his position at the university he came to meet Little Albert’s mother, Arvilla Merritte, who worked at a campus hospital (DeAngelis, 2010). Watson offered her a dollar to allow her son to be the subject of his experiments in classical conditioning. Through these experiments, Little Albert was exposed to and conditioned to fear certain things. Initially he was presented with various neutral stimuli, including a rabbit, a dog, a monkey, masks, cotton wool, and a white rat. He was not afraid of any of these things. Then Watson, with the help of Rayner, conditioned Little Albert to associate these stimuli with an emotion—fear. For example, Watson handed Little Albert the white rat, and Little Albert enjoyed playing with it. Then Watson made a loud sound, by striking a hammer against a metal bar hanging behind Little Albert’s head, each time Little Albert touched the rat. Little Albert was frightened by the sound—demonstrating a reflexive fear of sudden loud noises—and began to cry. Watson repeatedly paired the loud sound with the white rat. Soon Little Albert became frightened by the white rat alone. In this case, what are the UCS, CS, UCR, and CR?
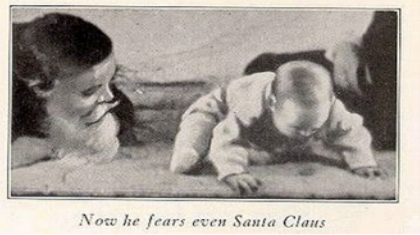
Days later, Little Albert demonstrated stimulus generalization—he became afraid of other furry things: a rabbit, a furry coat, and even a Santa Claus mask (Figure 6.9). Watson had succeeded in conditioning a fear response in Little Albert, thus demonstrating that emotions could become conditioned responses. It had been Watson’s intention to produce a phobia—a persistent, excessive fear of a specific object or situation— through conditioning alone, thus countering Freud’s view that phobias are caused by deep, hidden conflicts in the mind. However, there is no evidence that Little Albert experienced phobias in later years. Little Albert’s mother moved away, ending the experiment. While Watson’s research provided new insight into conditioning, it would be considered unethical by today’s standards.
EVERYDAY CONNECTION
Advertising and Associative Learning
Advertising executives are pros at applying the principles of associative learning. Think about the car commercials you have seen on television. Many of them feature an attractive model. By associating the model with the car being advertised, you come to see the car as being desirable (Cialdini, 2008). You may be asking yourself, does this advertising technique actually work? According to Cialdini (2008), men who viewed a car commercial that included an attractive model later rated the car as being faster, more appealing, and better designed than did men who viewed an advertisement for the same car minus the model.
Have you ever noticed how quickly advertisers cancel contracts with a famous athlete following a scandal? As far as the advertiser is concerned, that athlete is no longer associated with positive feelings; therefore, the athlete cannot be used as an unconditioned stimulus to condition the public to associate positive feelings (the unconditioned response) with their product (the conditioned stimulus).
Now that you are aware of how associative learning works, see if you can find examples of these types of advertisements on television, in magazines, or on the Internet.
6.2 TEST YOURSELF
Summary: 6.2 Classical Conditioning
Pavlov’s pioneering work with dogs contributed greatly to what we know about learning. His experiments explored the type of associative learning we now call classical conditioning. In classical conditioning, organisms learn to associate events that repeatedly happen together, and researchers study how a reflexive response to a stimulus can be mapped to a different stimulus—by training an association between the two stimuli. Pavlov’s experiments show how stimulus-response bonds are formed. Watson, the founder of behaviorism, was greatly influenced by Pavlov’s work. He tested humans by conditioning fear in an infant known as Little Albert. His findings suggest that classical conditioning can explain how some fears develop.
6.3 Operant Conditioning
LEARNING OBJECTIVES
By the end of this section, you will be able to:
- Define operant conditioning
- Explain the difference between reinforcement and punishment
- Distinguish between reinforcement schedules
The previous section of this chapter focused on the type of associative learning known as classical conditioning. Remember that in classical conditioning, something in the environment triggers a reflex automatically, and researchers train the organism to react to a different stimulus. Now we turn to the second type of associative learning, operant conditioning. In operant conditioning, organisms learn to associate a behavior and its consequence (Table 6.1). A pleasant consequence makes that behavior more likely to be repeated in the future. For example, Spirit, a dolphin at the National Aquarium in Baltimore, does a flip in the air when her trainer blows a whistle. The consequence is that she gets a fish.

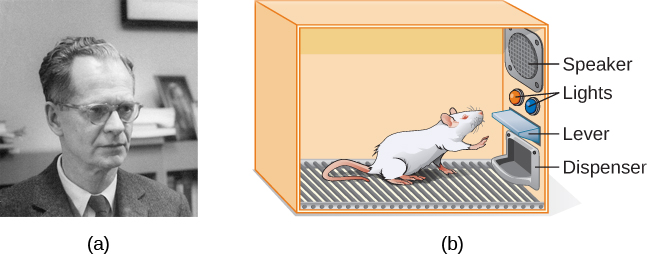
Psychologist B. F. Skinner saw that classical conditioning is limited to existing behaviors that are reflexively elicited, and it doesn’t account for new behaviors such as riding a bike. He proposed a theory about how such behaviors come about. Skinner believed that behavior is motivated by the consequences we receive for the behavior: the reinforcements and punishments. His idea that learning is the result of consequences is based on the law of effect, which was first proposed by psychologist Edward Thorndike. According to the law of effect, behaviors that are followed by consequences that are satisfying to the organism are more likely to be repeated, and behaviors that are followed by unpleasant consequences are less likely to be repeated (Thorndike, 1911). Essentially, if an organism does something that brings about a desired result, the organism is more likely to do it again. If an organism does something that does not bring about a desired result, the organism is less likely to do it again. An example of the law of effect is in employment. One of the reasons (and often the main reason) we show up for work is because we get paid to do so. If we stop getting paid, we will likely stop showing up—even if we love our job.
Working with Thorndike’s law of effect as his foundation, Skinner began conducting scientific experiments on animals (mainly rats and pigeons) to determine how organisms learn through operant conditioning (Skinner, 1938). He placed these animals inside an operant conditioning chamber, which has come to be known as a “Skinner box” (Figure 6.10). A Skinner box contains a lever (for rats) or disk (for pigeons) that the animal can press or peck for a food reward via the dispenser. Speakers and lights can be associated with certain behaviors. A recorder counts the number of responses made by the animal.
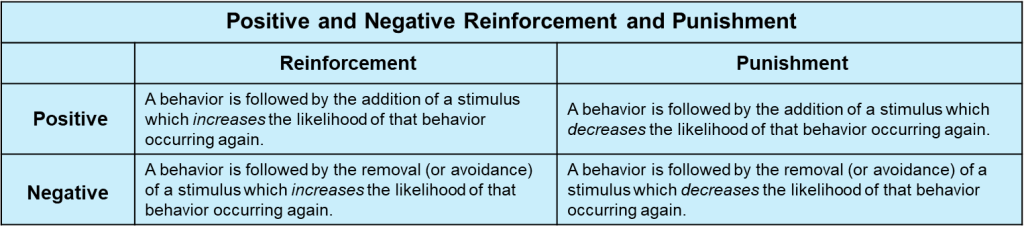
In discussing operant conditioning, we use several everyday words—positive, negative, reinforcement, and punishment—in a specialized manner. In operant conditioning, positive and negative do not mean good and bad. Instead, positive means you are adding something, and negative means you are taking something away. Reinforcement means you are increasing a behavior, and punishment means you are decreasing a behavior. Reinforcement can be positive or negative, and punishment can also be positive or negative. All reinforcers (positive or negative) increase the likelihood of a behavioral response. All punishers (positive or negative) decrease the likelihood of a behavioral response. Now let’s combine these four terms: positive reinforcement, negative reinforcement, positive punishment, and negative punishment (Table 6.2).
Reinforcement
The most effective way to teach a person or animal a new behavior is with positive reinforcementt. In positive reinforcement, a desirable stimulus is added to increase a behavior.
For example, you tell your five-year-old son, Jerome, that if he cleans his room, he will get a toy. Jerome quickly cleans his room because he wants a new art set. Let’s pause for a moment. Some people might say, “Why should I reinforce my child for doing what is expected?” But in fact, we are constantly and consistently reinforced in our lives. Our paychecks are reinforcers, as are high grades and acceptance into our preferred school. Being praised for doing a good job and for passing a driver’s test is also a reinforcer. Positive reinforcement as a learning tool is extremely effective. It has been found that one of the most effective ways to increase achievement in school districts with below-average reading scores was to pay the children to read. Specifically, second-grade students in Dallas were paid $2 each time they read a book and passed a short quiz about the book. The result was a significant increase in reading comprehension (Fryer, 2010). What do you think about this program? If Skinner were alive today, he would probably think this was a great idea. He was a strong proponent of using operant conditioning principles to influence students’ behavior at school. In fact, in addition to the Skinner box, he also invented what he called a teaching machine that was designed to reward small steps in learning (Skinner, 1961)—an early forerunner of computer-assisted learning. His teaching machine tested students’ knowledge as they worked through various school subjects. If students answered questions correctly, they received immediate positive reinforcement and could continue; if they answered incorrectly, they did not receive any reinforcement. The idea was that students would spend additional time studying the material to increase their chance of being reinforced the next time (Skinner, 1961).
In negative reinforcement, an undesirable stimulus is removed to increase a behavior. For example, car manufacturers use the principles of negative reinforcement in their seatbelt systems, which go “beep, beep, beep” until you fasten your seatbelt. The annoying sound stops when you exhibit the desired behavior, increasing the likelihood that you will buckle up in the future. Negative reinforcement is also used frequently in horse training. Riders apply pressure—by pulling the reins or squeezing their legs—and then remove the pressure when the horse performs the desired behavior, such as turning or speeding up. The pressure is the undesirable stimulus that the horse wants to remove.
Punishment
Many people confuse negative reinforcement with punishment in operant conditioning, but they are two very different mechanisms. Remember that reinforcement, whether it is positive or negative, always increases a behavior. In contrast, punishment, whether it is positive or negative, always decreases a behavior. In positive punishment, you add an undesirable stimulus to decrease a behavior. An example of positive punishment is scolding a student to get the student to stop texting in class. In this case, a stimulus (the reprimand) is added in order to decrease the behavior (texting in class). In negative punishment, you remove a pleasant stimulus to decrease behavior. For example, when a child misbehaves, a parent can take away a favorite toy. In this case, a stimulus (the toy) is removed in order to decrease the behavior.
Punishment, especially when it is immediate, is one way to decrease undesirable behavior. For example, imagine your four-year-old son, Brandon, hit his younger brother. You have Brandon write 100 times “I will not hit my brother” (positive punishment). Chances are he won’t repeat this behavior. While strategies like this are common today, in the past children were often subject to physical punishment, such as spanking. It’s important to be aware of some of the drawbacks in using physical punishment on children. First, punishment may teach fear. Brandon may become fearful of the street, but he also may become fearful of the person who delivered the punishment—you, his parent. Similarly, children who are punished by teachers may come to fear the teacher and try to avoid school (Gershoff et al., 2010). Consequently, most schools in the United States have banned corporal punishment. Second, punishment may cause children to become more aggressive and prone to antisocial behavior and delinquency (Gershoff, 2002). They see their parents resort to spanking when they become angry and frustrated, so, in turn, they may act out this same behavior when they become angry and frustrated. For example, because you spank Brenda when you are angry with her for her misbehavior, she might start hitting her friends when they won’t share their toys.
While positive punishment can be effective in some cases, Skinner suggested that the use of punishment should be weighed against the possible negative effects. Today’s psychologists and parenting experts favor reinforcement over punishment—they recommend that you catch your child doing something good and reinforce them for it.
Shaping
In his operant conditioning experiments, Skinner often used an approach called shaping. Instead of reinforcing only the target behavior, in shaping, we reward successive approximations of a target behavior. Why is shaping needed? Remember that in order for reinforcement to work, the organism must first display the behavior. Shaping is needed because it is extremely unlikely that an organism will display anything but the simplest of behaviors spontaneously. In shaping, behaviors are broken down into many small, achievable steps. The specific steps used in the process are the following:
- Reinforce the first response that resembles the desired behavior.
- Then reinforce the second step in the response chain that more closely resembles the desired behavior. You will no longer reinforce the previously response.
- Next, reinforce the third step in response chain that even more closely resembles the desired behavior. Remember, you will no longer reinforce the previous two steps.
- Continue to progress up the response chain by reinforcing closer approximations of the desired behavior, while discontinuing reinforcement for previous steps.
- Finally, only reinforce the final desired behavior.
Shaping is often used in teaching a complex behavior or chain of behaviors. Skinner used shaping to teach pigeons not only such relatively simple behaviors as pecking a disk in a Skinner box, but also many unusual and entertaining behaviors, such as turning in circles, walking in figure eights, and even playing ping pong; the technique is commonly used by animal trainers today. An important part of shaping is stimulus discrimination. Recall Pavlov’s dogs—he trained them to respond to the tone of a bell, and not to similar tones or sounds. This discrimination is also important in operant conditioning and in shaping behavior.
It’s easy to see how shaping is effective in teaching behaviors to animals, but how does shaping work with humans? Let’s consider parents whose goal is to have their child learn to clean his room. They use shaping to help him master steps toward the goal. Instead of performing the entire task, they set up these steps and reinforce each step. First, he cleans up one toy. Second, he cleans up five toys. Third, he chooses whether to pick up ten toys or put his books and clothes away. Fourth, he cleans up everything except two toys. Finally, he cleans his entire room.
Primary and Secondary Reinforcers
Items such as stickers, praise, money, toys, and more can be used to reinforce learning. Let’s go back to Skinner’s rats again. How did the rats learn to press the lever in the Skinner box? They were reinforced with food each time they pressed the lever. For animals, food would be an obvious reinforcer.
What would be a good reinforcer for humans? For your child Chris, it was the promise of a toy when they cleaned their room. How about Sydney, the soccer player? If you gave Sydney a piece of candy every time Sydney scored a goal, you would be using a primary reinforcer. Primary reinforcers are reinforcers that have innate reinforcing qualities. These kinds of reinforcers are not learned. Water, food, sleep, shelter, sex, and touch, among others, are primary reinforcers. Pleasure is also a primary reinforcer. Organisms do not lose their drive for these things. For most people, jumping in a cool lake on a very hot day would be reinforcing and the cool lake would be innately reinforcing—the water would cool the person off (a physical need), as well as provide pleasure.
A secondary reinforcer has no inherent value and only has reinforcing qualities when linked with a primary reinforcer. Praise, linked to affection, is one example of a secondary reinforcer, as when you called out “Great shot!” every time Sydney made a goal. Another example, money, is only worth something when you can use it to buy other things—either things that satisfy basic needs (food, water, shelter—all primary reinforcers) or other secondary reinforcers. If you were on a remote island in the middle of the Pacific Ocean and you had stacks of money, the money would not be useful if you could not spend it. What about the stickers on the behavior chart? They also are secondary reinforcers.
Sometimes, instead of stickers on a sticker chart, a token is used. Tokens, which are also secondary reinforcers, can then be traded in for desired items. Entire behavior management systems, known as token economies, are built around the use of these kinds of token reinforcers. Token economies have been found to be very effective at modifying behavior in a variety of settings such as schools, prisons, and mental hospitals. For example, a study by Cangi and Daly (2013) found that use of a token economy increased appropriate social behaviors and reduced inappropriate behaviors in a group of autistic school children. Autistic children tend to exhibit disruptive behaviors such as pinching and hitting. When the children in the study exhibited appropriate behavior (not hitting or pinching), they received a “quiet hands” token. When they hit or pinched, they lost a token. The children could then exchange specified amounts of tokens for minutes of playtime.
EVERYDAY CONNECTION
Behavior Modification in Children
Parents and teachers often use behavior modification to change a child’s behavior. Behavior modification uses the principles of operant conditioning to accomplish behavior change so that undesirable behaviors are switched for more socially acceptable ones. Some teachers and parents create a sticker chart, in which several behaviors are listed (Figure 6.11). Sticker charts are a form of token economies, as described in the text. Each time children perform the behavior, they get a sticker, and after a certain number of stickers, they get a reinforcer. The goal is to increase acceptable behaviors and decrease misbehavior. Remember, it is best to reinforce desired behaviors, rather than to use punishment. In the classroom, the teacher can reinforce a wide range of behaviors, from students raising their hands, to walking quietly in the hall, to turning in their homework. At home, parents might create a behavior chart that rewards children for things such as putting away toys, brushing their teeth, and helping with dinner. In order for behavior modification to be effective, the reinforcement needs to be connected with the behavior; the reinforcer must matter to the child and be done consistently.

There are several important points that you should know if you plan to implement time-out as a behavior modification technique. First, make sure the child is being removed from a desirable activity and placed in a less desirable location. If the activity is something undesirable for the child, this technique will backfire because it is more enjoyable for the child to be removed from the activity. Second, the length of the time-out is important. The general rule of thumb is one minute for each year of the child’s age. Sophia is five; therefore, she sits in a time-out for five minutes. Setting a timer helps children know how long they have to sit in time-out. Finally, as a caregiver, keep several guidelines in mind over the course of a time-out: remain calm when directing your child to time-out; ignore your child during time-out (because caregiver attention may reinforce misbehavior); and give the child a hug or a kind word when time-out is over.

Remember, the best way to teach a person or animal a behavior is to use positive reinforcement. For example, Skinner used positive reinforcement to teach rats to press a lever in a Skinner box. At first, the rat might randomly hit the lever while exploring the box, and out would come a pellet of food. After eating the pellet, what do you think the hungry rat did next? It hit the lever again, and received another pellet of food. Each time the rat hit the lever, a pellet of food came out. When an organism receives a reinforcer each time it displays a behavior, it is called continuous reinforcement. This reinforcement schedule is the quickest way to teach someone a behavior, and it is especially effective in training a new behavior. Let’s look back at the dog that was learning to sit earlier in the chapter. Now, each time he sits, you give him a treat. Timing is important here: you will be most successful if you present the reinforcer immediately after he sits, so that he can make an association between the target behavior (sitting) and the consequence (getting a treat).
Once a behavior is trained, researchers and trainers often turn to another type of reinforcement schedule—partial reinforcement. In partial reinforcement, also referred to as intermittent reinforcement, the person or animal does not get reinforced every time they perform the desired behavior. There are several different types of partial reinforcement schedules (Table 6.3). These schedules are described as either fixed or variable, and as either interval or ratio. Fixed refers to the number of responses required for reinforcement, or the amount of time that must elapse before a response can be reinforced, which is set and unchanging. Variable refers to the unpredictable number of responses or an unpredictable amount of time that is required for reinforcement, which varies or changes. Interval means the schedule is based on the amount of time that must elapse before a response can be reinforced. Ratio means the schedule is based on the number of responses that must occur before a reinforcer is delivered.
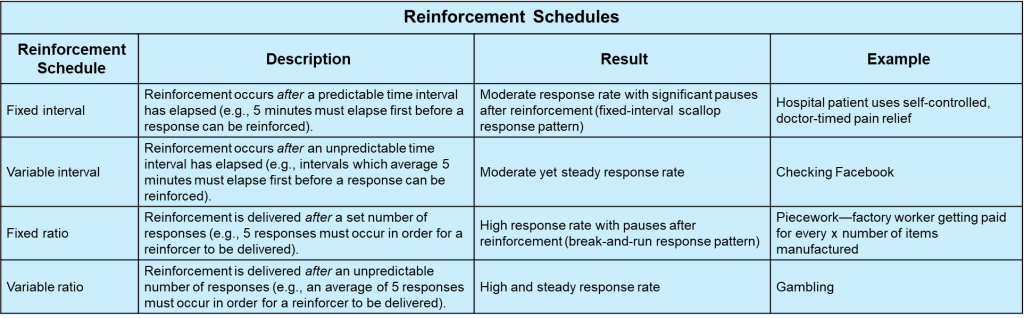
Now let’s combine these four terms. A fixed interval reinforcement schedule is when behavior is reinforced after a set amount of time. For example, June undergoes major surgery in a hospital. During recovery, she is expected to experience pain and will require prescription medications for pain relief. June is given an IV drip with a patient-controlled painkiller. Her doctor sets a limit: one dose per hour. June pushes a button when pain becomes difficult, and she receives a dose of medication. Since the reward (pain relief) only occurs on a fixed interval, there is no point in exhibiting the behavior when it will not be reinforced.
With a variable interval reinforcement schedule, the person or animal gets the reinforcer based on varying amounts of time, which are unpredictable. Say that Manuel is the manager at a fast-food restaurant. Every once in a while someone from the quality control division comes to Manuel’s restaurant. If the restaurant is clean and the service is fast, everyone on that shift earns a $20 bonus. Manuel never knows when the quality control person will show up, so he always tries to keep the restaurant clean and ensures that his employees provide prompt and courteous service. His productivity regarding prompt service and keeping a clean restaurant are steady because he wants his crew to earn the bonus.
With a fixed ratio reinforcement schedule, there are a set number of responses that must occur before the behavior is reinforced. Carla sells glasses at an eyeglass store, and she earns a commission every time she sells a pair of glasses. She always tries to sell people more pairs of glasses, including prescription sunglasses or a backup pair, so she can increase her commission. She does not care if the person really needs the prescription sunglasses, Carla just wants her bonus. The quality of what Carla sells does not matter because her commission is not based on quality; it’s only based on the number of pairs sold. This distinction in the quality of performance can help determine which reinforcement method is most appropriate for a particular situation. Fixed ratios are better suited to optimize the quantity of output, whereas a fixed interval, in which the reinforcer is not quantity based, can lead to a higher quality of output.
In a variable ratio reinforcement schedule, the number of responses needed for a reinforcer varies. This is the most powerful partial reinforcement schedule. An example of the variable ratio reinforcement schedule is gambling. Imagine that Sarah—generally a smart, thrifty woman—visits Las Vegas for the first time. She is not a gambler, but out of curiosity she puts a quarter into the slot machine, and then another, and another. Nothing happens. Two dollars in quarters later, her curiosity is fading, and she is just about to quit. But then, the machine lights up, bells go off, and Sarah gets 50 quarters back. That’s more like it! Sarah gets back to inserting quarters with renewed interest, and a few minutes later she has used up all her gains and is $10 in the hole. Now might be a sensible time to quit. And yet, she keeps putting money into the slot machine because she never knows when the next reinforcer is coming. She keeps thinking that with the next quarter she could win $50, or $100, or even more. Because the reinforcement schedule in most types of gambling has a variable ratio schedule, people keep trying and hoping that the next time they will win big. This is one of the reasons that gambling is so addictive—and so resistant to extinction.
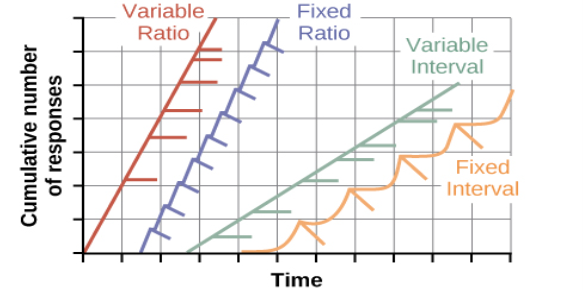
In operant conditioning, extinction of a reinforced behavior occurs at some point after reinforcement stops, and the speed at which this happens depends on the reinforcement schedule. In a variable ratio schedule, the point of extinction comes very slowly, as described above. But in the other reinforcement schedules, extinction may come quickly. For example, if June presses the button for the pain relief medication before the allotted time her doctor has approved, no medication is administered. She is on a fixed interval reinforcement schedule (dosed hourly), so extinction occurs quickly when reinforcement doesn’t come at the expected time. Among the reinforcement schedules, variable ratio is the most productive and the most resistant to extinction. Fixed interval is the least productive and the easiest to extinguish (Figure 6.13).
CONNECT THE CONCEPTS
Gambling and the Brain
Skinner (1953) stated, “If the gambling establishment cannot persuade a patron to turn over money with no return, it may achieve the same effect by returning part of the patron’s money on a variable-ratio schedule” (p. 397).
Skinner uses gambling as an example of the power of the variable-ratio reinforcement schedule for maintaining behavior even during long periods without any reinforcement. In fact, Skinner was so confident in his knowledge of gambling addiction that he even claimed he could turn a pigeon into a pathological gambler (“Skinner’s Utopia,” 1971). It is indeed true that variable-ratio schedules keep behavior quite persistent—just imagine the frequency of a child’s tantrums if a parent gives in even once to the behavior. The occasional reward makes it almost impossible to stop the behavior.
Recent research in rats has failed to support Skinner’s idea that training on variable-ratio schedules alone causes pathological gambling (Laskowski et al., 2019). However, other research suggests that gambling does seem to work on the brain in the same way as most addictive drugs, and so there may be some combination of brain chemistry and reinforcement schedule that could lead to problem gambling (Figure 6.14). Specifically, modern research shows the connection between gambling and the activation of the reward centers of the brain that use the neurotransmitter (brain chemical) dopamine (Murch & Clark, 2016). Interestingly, gamblers don’t even have to win to experience the “rush” of dopamine in the brain. “Near misses,” or almost winning but not actually winning, also have been shown to increase activity in the ventral striatum and other brain reward centers that use dopamine (Chase & Clark, 2010). These brain effects are almost identical to those produced by addictive drugs like cocaine and heroin (Murch & Clark, 2016). Based on the neuroscientific evidence showing these similarities, the DSM-5 now considers gambling an addiction, while earlier versions of the DSM classified gambling as an impulse control disorder.

It may be that pathological gamblers’ brains are different than those of other people, and perhaps this difference may somehow have led to their gambling addiction, as these studies seem to suggest. However, it is very difficult to ascertain the cause because it is impossible to conduct a true experiment (it would be unethical to try to turn randomly assigned participants into problem gamblers). Therefore, it may be that causation actually moves in the opposite direction—perhaps the act of gambling somehow changes neurotransmitter levels in some gamblers’ brains. It also is possible that some overlooked factor, or confounding variable, played a role in both the gambling addiction and the differences in brain chemistry.
Cognition and Latent Learning
Strict behaviorists like Watson and Skinner focused exclusively on studying overt behavior rather than cognition (such as thoughts and expectations). In fact, Skinner’s ideas were considered to be radical behaviorism. Skinner considered the mind a “black box”—something completely unmeasurable—and, therefore, something not to be studied. However, another behaviorist, Edward C. Tolman, had a different opinion. Tolman’s experiments with rats demonstrated that organisms can learn even if they do not receive immediate reinforcement (Tolman & Honzik, 1930; Tolman, Ritchie, & Kalish, 1946). This finding was in conflict with the prevailing idea at the time that reinforcement must be immediate in order for learning to occur, thus suggesting a cognitive aspect to learning.
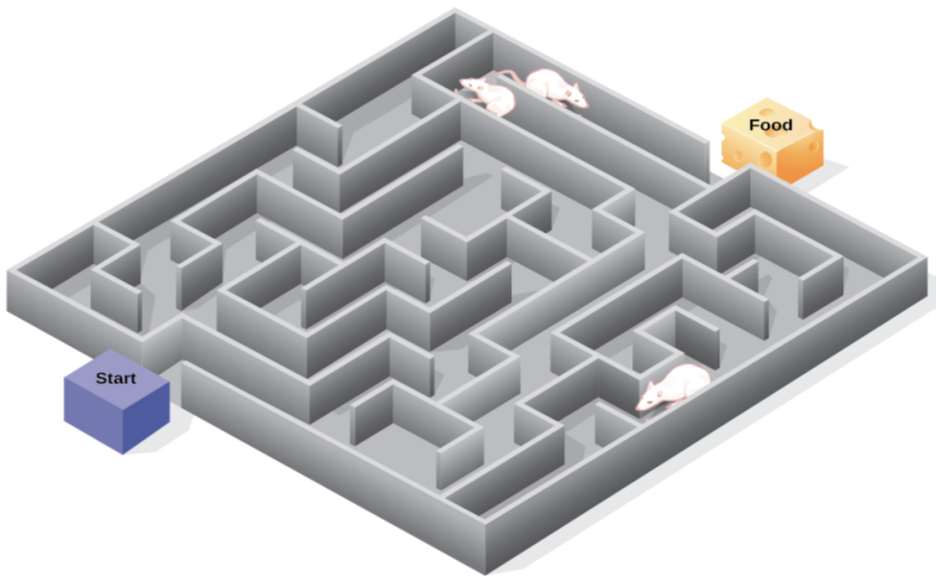
In the experiments, Tolman placed hungry rats in a maze with no reinforcer for finding their way through it. He also studied a comparison group that was reinforced with food at the end of the maze. As the unreinforced rats explored the maze, they developed a cognitive map: a mental picture of the layout of the maze (Figure 6.15). After 10 sessions in the maze without reinforcement, food was placed in a goal box at the end of the maze. As soon as the rats became aware of the food, they were able to find their way through the maze quickly, just as quickly as the comparison group, which had been reinforced with food all along. This is known as latent learning: learning that occurs but is not observable in behavior until there is a reason to demonstrate it.
EVERYDAY CONNECTION
This Place Is Like a Maze
Have you ever gotten lost in a building and couldn’t find your way back out? While that can be frustrating, you’re not alone. At one time or another we’ve all gotten lost in places like a museum, hospital, or university library. Whenever we go someplace new, we build a mental representation—or cognitive map—of the location, as Tolman’s rats built a cognitive map of their maze. However, some buildings are confusing because they include many areas that look alike or have short lines of sight. Because of this, it’s often difficult to predict what’s around a corner or decide whether to turn left or right to get out of a building. Psychologist Laura Carlson (2010) suggests that what we place in our cognitive map can impact our success in navigating through the environment. She suggests that paying attention to specific features upon entering a building, such as a picture on the wall, a fountain, a statue, or an escalator, adds information to our cognitive map that can be used later to help find our way out of the building.
6.3 TEST YOURSELF
Summary: 6.3 Operant Conditioning
Operant conditioning is based on the work of B. F. Skinner. Operant conditioning is a form of learning in which the motivation for a behavior happens after the behavior is demonstrated. An animal or a human receives a consequence after performing a specific behavior. The consequence is either a reinforcer or a punisher. All reinforcement (positive or negative) increases the likelihood of a behavioral response. All punishment (positive or negative) decreases the likelihood of a behavioral response. Several types of reinforcement schedules are used to reward behavior depending on either a set or variable period of time.
6.4 Observational Learning (Modeling)
LEARNING OBJECTIVES
By the end of this section, you will be able to:
- Define observational learning
- Discuss the steps in the modeling process
- Explain the prosocial and antisocial effects of observational learning
Previous sections of this chapter focused on classical and operant conditioning, which are forms of associative learning. In observational learning, we learn by watching others and then imitating, or modeling, what they do or say. For instance, have you ever gone to YouTube to find a video showing you how to do something? The individuals performing the imitated behavior are called models. Research suggests that this imitative learning involves a specific type of neuron, called a mirror neuron (Hickock, 2010; Rizzolatti, Fadiga, Fogassi, & Gallese, 2002; Rizzolatti, Fogassi, & Gallese, 2006).
Humans and other animals are capable of observational learning. As you will see, the phrase “monkey see, monkey do” really is accurate (Figure 6.16). The same could be said about other animals. For example, in a study of social learning in chimpanzees, researchers gave juice boxes with straws to two groups of captive chimpanzees. The first group dipped the straw into the juice box, and then sucked on the small amount of juice at the end of the straw. The second group sucked through the straw directly, getting much more juice. When the first group, the “dippers,” observed the second group, “the suckers,” what do you think happened? All of the “dippers” in the first group switched to sucking through the straws directly. By simply observing the other chimps and modeling their behavior, they learned that this was a more efficient method of getting juice (Yamamoto, Humle, and Tanaka, 2013).

Like Tolman, whose experiments with rats suggested a cognitive component to learning, psychologist Albert Bandura’s ideas about learning were different from those of strict behaviorists. Bandura and other researchers proposed a brand of behaviorism called social learning theory, which took cognitive processes into account. According to Bandura, pure behaviorism could not explain why learning can take place in the absence of external reinforcement. He felt that internal mental states must also have a role in learning and that observational learning involves much more than imitation. In imitation, a person simply copies what the model does. Observational learning is much more complex. According to Lefrançois (2012) there are several ways that observational learning can occur:
- You learn a new response. After watching your coworker get chewed out by your boss for coming in late, you start leaving home 10 minutes earlier so that you won’t be late.
- You choose whether or not to imitate the model depending on what you saw happen to the model. Remember Julian and his father? When learning to surf, Julian might watch how his father pops up successfully on his surfboard and then attempt to do the same thing. On the other hand, Julian might learn not to touch a hot stove after watching his father get burned on a stove.
- You learn a general rule that you can apply to other situations.
Bandura identified three kinds of models: live, verbal, and symbolic. A live model demonstrates a behavior in person, as when Ben stood up on his surfboard so that Julian could see how he did it. A verbal instructional model does not perform the behavior, but instead explains or describes the behavior, as when a soccer coach tells his young players to kick the ball with the side of the foot, not with the toe. A symbolic model can be fictional characters or real people who demonstrate behaviors in books, movies, television shows, video games, or Internet sources (Figure 6.17).
Steps in the Modeling Process
Of course, we don’t learn a behavior simply by observing a model. Bandura described specific steps in the process of modeling that must be followed if learning is to be successful: attention, retention, reproduction, and motivation. First, you must be focused on what the model is doing—you have to pay attention. Next, you must be able to retain, or remember, what you observed; this is retention. Then, you must be able to perform the behavior that you observed and committed to memory; this is reproduction. Finally, you must have motivation. You need to want to copy the behavior, and whether or not you are motivated depends on what happened to the model. If you saw that the model was reinforced for her behavior, you will be more motivated to copy her. This is known as vicarious reinforcement. On the other hand, if you observed the model being punished, you would be less motivated to copy her. This is called vicarious punishment. For example, imagine that four-year-old Allison watched her older sister Kaitlyn playing in their mother’s makeup, and then saw Kaitlyn get a time out when their mother came in. After their mother left the room, Allison was tempted to play in the make-up, but she did not want to get a time-out from her mother. What do you think she did? Once you actually demonstrate the new behavior, the reinforcement you receive plays a part in whether or not you will repeat the behavior.
Bandura researched modeling behavior, particularly children’s modeling of adults’ aggressive and violent behaviors (Bandura, Ross, & Ross, 1961). He conducted an experiment with a five-foot inflatable doll that he called a Bobo doll. In the experiment, children’s aggressive behavior was influenced by whether the teacher was punished for her behavior. In one scenario, a teacher acted aggressively with the doll, hitting, throwing, and even punching the doll, while a child watched. There were two types of responses by the children to the teacher’s behavior. When the teacher was punished for her bad behavior, the children decreased their tendency to act as she had. When the teacher was praised or ignored (and not punished for her behavior), the children imitated what she did, and even what she said. They punched, kicked, and yelled at the doll.
What are the implications of this study? Bandura concluded that we watch and learn, and that this learning can have both prosocial and antisocial effects. Prosocial (positive) models can be used to encourage socially acceptable behavior. Parents in particular should take note of this finding. If you want your children to read, then read to them. Let them see you reading. Keep books in your home. Talk about your favorite books. If you want your children to be healthy, then let them see you eat right and exercise, and spend time engaging in physical fitness activities together. The same holds true for qualities like kindness, courtesy, and honesty. The main idea is that children observe and learn from their parents, even their parents’ morals, so be consistent and toss out the old adage “Do as I say, not as I do,” because children tend to copy what you do instead of what you say. Besides parents, many public figures, such as Martin Luther King, Jr. and Mahatma Gandhi, are viewed as prosocial models who are able to inspire global social change. Can you think of someone who has been a prosocial model in your life?
The antisocial effects of observational learning are also worth mentioning. As you saw from the example of Claire at the beginning of this section, her daughter viewed Claire’s aggressive behavior and copied it. Research suggests that this may help to explain why abused children often grow up to be abusers themselves (Murrell, Christoff, & Henning, 2007). In fact, about 30% of abused children become abusive parents (U.S. Department of Health & Human Services, 2013). We tend to do what we know. Abused children, who grow up witnessing their parents deal with anger and frustration through violent and aggressive acts, often learn to behave in that manner themselves. Sadly, it’s a vicious cycle that’s difficult to break.
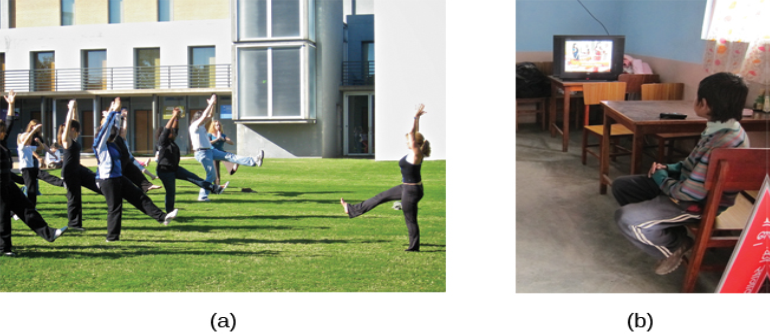
Some studies suggest that violent television shows, movies, and video games may also have antisocial effects (Figure 6.18) although further research needs to be done to understand the correlational and causational aspects of media violence and behavior. Some studies have found a link between viewing violence and aggression seen in children (Anderson & Gentile, 2008; Kirsch, 2010; Miller, Grabell, Thomas, Bermann, & Graham-Bermann, 2012). These findings may not be surprising, given that a child graduating from high school has been exposed to around 200,000 violent acts including murder, robbery, torture, bombings, beatings, and rape through various forms of media (Huston et al., 1992). Not only might viewing media violence affect aggressive behavior by teaching people to act that way in real life situations, but it has also been suggested that repeated exposure to violent acts also desensitizes people to it. Psychologists are working to understand this dynamic.

WHAT DO YOU THINK?
Violent Media and Aggression
Does watching violent media or playing violent video games cause aggression? Albert Bandura’s early studies suggested television violence increased aggression in children, and more recent studies support these findings. For example, research by Craig Anderson and colleagues (Anderson, Bushman, Donnerstein, Hummer, & Warbuten, 2015; Anderson et al., 2010; Bushman et al., 2016) found extensive evidence to suggest a causal link between hours of exposure to violent media and aggressive thoughts and behaviors. However, studies by Christopher Ferguson and others suggest that while there may be a link between violent media exposure and aggression, research to date has not accounted for other risk factors for aggression including mental health and family life (Ferguson, 2011; Gentile, 2016). What do think?
6.4 TEST YOURSELF
Summary: 6.4 Observational Learning (Modeling)
According to Bandura, learning can occur by watching others and then modeling what they do or say. This is known as observational learning. There are specific steps in the process of modeling that must be followed if learning is to be successful. These steps include attention, retention, reproduction, and motivation. Through modeling, Bandura has shown that children learn many things both good and bad simply by watching their parents, siblings, and others.
Critical Thinking Questions
- Compare and contrast classical and operant conditioning. How are they alike? How do they differ?
- What is the difference between a reflex and a learned behavior?
- If the sound of your toaster popping up toast causes your mouth to water, what are the UCS, CS, and CR?
- Explain how the processes of stimulus generalization and stimulus discrimination are considered opposites.
- How does a neutral stimulus become a conditioned stimulus?
- What is a Skinner box and what is its purpose?
- What is the difference between negative reinforcement and punishment?
- What is shaping and how would you use shaping to teach a dog to roll over?
- What is the effect of prosocial modeling and antisocial modeling?
- Cara is 17 years old. Cara’s mother and father both drink alcohol every night. They tell Cara that drinking is bad and she shouldn’t do it. Cara goes to a party where beer is being served. What do you think Cara will
do? Why?
Personal Application Questions
- What is your personal definition of learning? How do your ideas about learning compare with the definition of learning presented in this text?
- What kinds of things have you learned through the process of classical conditioning? Operant conditioning? Observational learning? How did you learn them?
- Can you think of an example in your life of how classical conditioning has produced a positive emotional response, such as happiness or excitement? How about a negative emotional response, such as fear,
anxiety, or anger? - Explain the difference between negative reinforcement and punishment, and provide several examples of each based on your own experiences.
- Think of a behavior that you have that you would like to change. How could you use behavior modification, specifically positive reinforcement, to change your behavior? What is your positive reinforcer?
- What is something you have learned how to do after watching someone else?
Tips for Understanding unconditioned and Conditioned Reflexes in Classical Conditioning
- Unconditioned reflexes (UCS –UCR) and inborn and unlearned, such as food (UCS) triggering salivation (UCR) or light (UCS) in the eye causes the pupil to constrict (UCR).
- Conditioned reflexes (CS-CR) are learned reflexes acquired by the reliable pairing of two stimuli (NS + UCS). A neutral stimulus (NS) like a sound, which does not elicit a response such as salivation (UCR), gets reliably paired with food (UCS). Eventually the sound alone (CS) triggers salivation (CR).
Tips for Understanding Reinforcement and Punishment in Operant Conditioning in Three Easy Steps
How to identify the different types of reinforcement or punishment: Positive reinforcement, negative reinforcement, positive punishment, negative punishment
- What is the effect on behavior? Identify if the behavior increasing or decreasing. If increasing (strengthening), you have reinforcement. If the behavior is decreasing (weakening) or you have punishment.
- What is the consequence of the behavior? Evaluate whether the consequence involves the addition of a stimulus (i.e., positive (+) means to add) or the removal/avoidance of a stimulus (i.e., negative (-) means to subtract).
- Then put the two together.
For example: Zelda hit her brother and her favorite toy was taken away by her mother. As a result, Zelda stopped hitting her brother.
- What is the effect on behavior? Zelda stopped hitting her brother, which is a decrease in behavior. This is punishment.
- What is the consequence of the behavior? Zelda favorite toy was removed as a consequence for hitting her brother. The toy being taken away is an example of a negative consequence because they toy was removed after she hit her brother. Remember, positive and negative in this case simply refers to the addition or subtraction of a consequence! Think of mathematics. Positive and negative do NOT refer to whether the consequence is pleasant or unpleasant.
- Put the type of consequence and the effect on behavior together, with the consequence coming first: In the case of Zelda, we have negative punishment.
Study Guide Outline: Learning Chapter 6.
(Note: Any of the information below can be placed on flash cards or used to create a flowchart or a concept map.)
1. What is Learning?
A. Innate (Unlearned) Behaviors
-
-
- Reflexes
- Automatic, involuntary responses to stimuli.
- Example: A baby sucking on a nipple
- Automatic, involuntary responses to stimuli.
- Instincts
- Inborn patterns of behavior that are more complex than reflexes
- Example: A bear hibernating in winter
- Inborn patterns of behavior that are more complex than reflexes
- Stimuli
- Environmental events that trigger reflexes or instincts
- These behaviors help organisms adapt to their environments
- Reflexes
-
B. Learned Behaviors
-
-
-
Learning
- A relatively permanent change in behavior or knowledge due to experience
- Example: Learning to surf through practice and repetition.
- A relatively permanent change in behavior or knowledge due to experience
-
-
C. Types of Learning
-
-
- Classical Conditioning (Pavlovian Conditioning)
- Organisms learn to associate two stimuli that repeatedly occur together.
- Example:
- Lightning (Stimulus 1) is followed by thunder (Stimulus 2)
- Thunder causes a jump (Response)
- Eventually, lightning alone causes a jump due to learned association between the two stimuli
- Example:
- Organisms learn to associate two stimuli that repeatedly occur together.
- Operant Conditioning
- Learning occurs through the consequences of behavior
- Organisms learn to associate a behavior with its outcome
-
- Reinforcement
- Increases the likelihood of repeating a behavior
- Example: Dog gets a treat after sitting → sits more often
- Increases the likelihood of repeating a behavior
- Punishment
- Decreases the likelihood of repeating a behavior
- Example: Dog receives a small shock for crossing a boundary → avoids that behavior
- Decreases the likelihood of repeating a behavior
- Reinforcement
-
- Observational Learning
- Observational learning is the process of learning by watching others and imitating their behavior
- Unlike classical and operant conditioning (which require direct experience), observational learning happens indirectly
- Many behaviors are learned by observing others, not just by trial and error
- Example: Learning to Surf
- Julian learns to surf by watching his dad, Ben. He can imitate successful moves and avoid mistakes, speeding up the learning process.
- Classical Conditioning (Pavlovian Conditioning)
-
D. Behaviorism: The Learning Tradition
-
-
- A school of psychology focused on observable behaviors and the ways they are learned
- Approaches Included:
- Classical Conditioning (Pavlov)
- Operant Conditioning (Skinner)
- Observational Learning (Bandura)
- The Role of Cognition
-
- Earlier behaviorists believed behavior is only a response to the environment
- The modern view recognizes that thoughts and mental processes (cognition) also influence learning.
-
-
2. Classical Conditioning
A. Ivan Pavlov and Classical Conditioning
-
-
- Ivan Pavlov (1849–1936)- Russian physiologist
- Pavlov – best known for his work on classical conditioning, discovered accidentally during experiments with dogs.
- What Is Classical Conditioning?
- Classical Conditioning – learning process where we associate two stimuli and, as a result, anticipate events.
- Example: If a bell rings every time food is presented, eventually the bell alone will make a dog salivate.
- Pavlov initially studied salivation in dogs in response to food.
- He noticed dogs began to salivate at:
- The sight of food
- An empty food bowl
- The sound of footsteps
- These were not natural reflexes, which led to further experimentation.
- Reflexes
- Unconditioned reflexes – natural, automatic responses to stimuli (e.g., salivating when food is in the mouth).
- Unconditioned Stimulus (UCS)- A stimulus that naturally and automatically triggers a response
- (e.g., food elicits salivation.
- Unconditioned Response (UCR)- A natural, unlearned response to the UCS
- (e.g., salivation to food.
- Neutral Stimulus (NS) – A stimulus that does not naturally trigger the UCR (e.g., a tone or bell before conditioning)
- Unconditioned Stimulus (UCS)- A stimulus that naturally and automatically triggers a response
- Conditioned reflexes – learned responses to previously neutral stimuli (e.g., salivating to a bell that signals food)
- Conditioned Stimulus (CS):- A previously neutral stimulus that, after being paired with the UCS, triggers a learned response (e.g., the tone or bell after conditioning)
- Conditioned Response (CR)- A learned response to the CS (e.g., salivation in response to the tone)
- Unconditioned reflexes – natural, automatic responses to stimuli (e.g., salivating when food is in the mouth).
- Reflexes
- Classical Conditioning – learning process where we associate two stimuli and, as a result, anticipate events.
- What Is Classical Conditioning?
- Three Stages of Classical Conditioning
- Before Conditioning
- Stimulus-Response Pairing:
- Meat Powder (UCS) → Salivation (UCR)
- Dogs naturally salivate when given meat powder.
- No learning has occurred yet.
- Stimulus-Response Pairing:
- During Conditioning
- Pairing of Stimuli:
- Tone (NS) + Meat Powder (UCS) → Salivation (UCR)
- The neutral tone is repeatedly presented just before the meat powder.
- Salivation still occurs because of the UCS.
- Pairing of Stimuli:
- After Conditioning
- Test for Conditioning:
- Tone (CS) → Salivation (CR)
- The tone alone now causes salivation.
- The dog has learned to associate the tone with the upcoming food.
- Test for Conditioning:
- Before Conditioning
-
B. Higher-Order Conditioning
-
-
- Higher-Order Conditioning
- An established CS is paired with a new NS (the second-order stimulus), so that eventually the new stimulus also elicits the CR, without the initial CS being presented.
- Example – Tiger hears the electric can opener, then gets food. She learns to associate the sound with mealtime.
Lately, the cabinet door has been squeaking. Now, Tiger gets excited when she hears the squeak of the cabinet door opening where the can opener and food are stored. The cabinet squeak becomes a second-order conditioned stimulus through its pairing with the can opener sound, the well-established first conditioned stimulus.
-
Conditioning Procedure:
-
Cabinet squeak (NS) + Can opener sound (CS 1) → Excitement (CR)
-
-
Higher-Order Conditioning:
-
Cabinet squeak (CS 2) → Excitement (CR)
-
-
- Example – Tiger hears the electric can opener, then gets food. She learns to associate the sound with mealtime.
- An established CS is paired with a new NS (the second-order stimulus), so that eventually the new stimulus also elicits the CR, without the initial CS being presented.
- Higher-Order Conditioning
-
C. General Processes in Classical Conditioning
-
-
-
Acquisition
- The initial stage – an organism learns to associate a neutral stimulus (NS) with an unconditioned stimulus (US).
- NS becomes CS through repeated pairing with US
- Timing between the CS and the US is essential for effective conditioning
- The CS should occur shortly before the US.
- Time Interval Range-can be as short as 5 seconds.
- May extend up to several hours depending on the type of conditioning
- Example – Taste Aversion
- Extinction
- The gradual weakening and disappearance of the CR when the UCS is no longer presented with the CS.
- Spontaneous Recovery
- The sudden return of a previously extinguished conditioned response after a rest period.
- Stimulus Discrimination
- The CR only occurs to the specific CS
- Helps animals (and humans) respond appropriately by recognizing which stimuli are associated with meaningful events (e.g., danger, food).
- Stimulus generalization
- The CR only occurs to stimuli that are similar to the CS.
- Helps generalize learning
-
-
D. Behaviorism
-
-
-
A school of thought in psychology that:
- Emphasizes observable behavior over internal mental processes
- Was influenced by Pavlov’s classical conditioning
- Views behavior as a stimulus-response pattern
- John B. Watson – Father of Behaviorism
- Believed psychology should be scientific
- Mental processes cannot be seen or measured.
- Claimed that psychology should only study things that can be objectively observed and recorded
- Watson shifted psychology toward a scientific, observable approach, laying the foundation for modern behavior-based studies and therapies.
- The Little Albert Experiment (Watson & Rayner, 1920)
- Purpose: To demonstrate that emotions like fear can be conditioned
- Subject: An infant named Little Albert
- Neutral stimulus shown to Little Albert: white rat. → No fear response
- Conditioning Procedure:
- White rat (NS) + loud, frightening noise (UCS) → Fear/crying from sound (UCR)
- Test for conditioning:
- White rat (CS) → Fear of rat (CR)
- After repeated pairings, Little Albert feared the rat even without the noise.
- Conditioning Procedure:
- Little Albert’s fear spread to similar stimuli (stimulus generalization):
- Rabbit
- Furry coat
- Santa Claus mask
- The Little Albert Experiment (Watson & Rayner, 1920)
-
-
3. Operant Conditioning
A. B.F Skinner and Operant conditioning
-
-
- Learning to associate a behavior with its consequence
- Behavior → Consequence → Future Behavior
- Example: Spirit the Dolphin performs a flip (behavior) when her trainer blows a whistle. She receives a fish (pleasant consequence), making her more likely to flip again.
- Behavior → Consequence → Future Behavior
- Behavior is strengthened or weakened depending on the consequence:
-
-
- Positive outcomes (reinforcers) increase behavior
- Negative outcomes (punishments) decrease behavior
-
-
- B.F. Skinner & Operant Conditioning
- Believed that classical conditioning only explains reflexive, automatic behaviors.
- It does not account for new or complex behaviors like riding a bike
- Focuses on voluntary behavior and how it is influenced by consequences
- Expanded on classical conditioning with his theory of operant conditioning
- The Law of Effect (Edward Thorndike, 1911) – Foundation of operant conditioning
- Behaviors followed by unpleasant consequences are less likely to be repeated
- Behaviors followed by satisfying consequences are more likely to be repeated
- Reinforcement: Increases the likelihood of a behavior.
- Punishment: Decreases the likelihood of a behavior.
- Reinforcement can be positive (adding a stimulus) or negative (removing a stimulus).
- The Law of Effect (Edward Thorndike, 1911) – Foundation of operant conditioning
- Skinner’s Experiments – B. F. Skinner developed systematically studied how behaviors are strengthened or weakened according to their consequences. Used an operant conditioning chamber (also known as a Skinner Box).
- Purpose: Measure how behavior changes based on reinforcers
- Included lights, sounds, and a reward dispenser
- For rats: A lever to press for food
- For pigeons: A disk to peck for food
- Reinforcement
- Positive reinforcement
- A stimulus is added after a desired behavior occurs, making the behavior more likely to occur again
- Example:
- Giving a child a toy for cleaning their room increases the likelihood of room cleaning in the future
- Example:
- A stimulus is added after a desired behavior occurs, making the behavior more likely to occur again
- Negative Reinforcement
- A stimulus stops or is removed after a desired behavior occurs, making the behavior more likely to occur again.
- Example:
- The car stops beeping when you fasten your seatbelt, which increases the likelihood of fastening your seatbelt in the future
- Example:
- A stimulus stops or is removed after a desired behavior occurs, making the behavior more likely to occur again.
- Positive reinforcement
- Punishment
- Positive Punishment
- A stimulus is added after an undesired behavior occurs, making the behavior less likely to occur again
- Example:
- When scolding a student for texting in class decreases the likelihood of texting in class
- Drawbacks of Physical Punishment
- May cause fear of the person delivering the punishment
- May lead to aggression
- Can lead to antisocial behavior and avoidance
- Expert recommendations
- Focus on reinforcement over punishment
- Catch and reinforce good behavior
- Use punishment cautiously; be aware of the possible psychological side effects
- Example:
- A stimulus is added after an undesired behavior occurs, making the behavior less likely to occur again
- Negative Punishment
- A stimulus is removed after an undesired behavior occurs, making the behavior less likely to occur again
- Example:
- When taking away a toy for a child’s misbehavior decreases the future likelihood of misbehaving
- Example:
- A stimulus is removed after an undesired behavior occurs, making the behavior less likely to occur again
- Positive Punishment
- Learning to associate a behavior with its consequence
-
B. Shaping
-
-
-
What Is Shaping?
- Shaping – technique used in operant conditioning where successive approximations of a target behavior are reinforced.
- Instead of waiting for the full behavior to occur spontaneously, small steps that lead toward the final behavior are reinforced.
- Why Is Shaping Needed?
- Organisms rarely perform complex behaviors spontaneously.
- Shaping helps build complex behaviors step by step.
- Reinforcement only works if the behavior occurs first — shaping increases the chances that it will.
- Steps in the Shaping Process
- Reinforce the first small behavior that resembles the target behavior.
- Reinforce the next behavior that is a closer approximation to the target behavior — stop reinforcing the previous one.
- Reinforce the next even closer behavior — stop reinforcing the earlier two.
- Continue this process – reinforcing only behaviors that are closer to the target behavior
- Only reinforce the final target behavior once it’s consistently performed.
- Examples of Shaping
- Skinner trained pigeons to:
- Peck a disk
- Turn in circles
- Walk in figure eights
- Even play ping pong!
- Animal trainers still use shaping to teach complex behaviors.
- Skinner trained pigeons to:
-
-
C. Types of Reinforcers
-
-
- Primary Reinforcers
- Have innate (natural, unlearned) reinforcing qualities
- Satisfy biological needs or provide pleasure
- Examples: Food, water, shelter, touch, sex, pleasure
- Secondary Reinforcers
- No inherent value on their own.
- Gain reinforcing power through association with primary reinforcers.
- Examples:
- Praise (associated with affection or approval)
- Money (used to buy things like food or toys)
- Stickers (often used on behavior charts where they can be exchanged for desired items)
- Primary Reinforcers
-
D. Behavior Modification and Token Economies
-
-
-
Behavior Modification
- A technique that uses the principles of operant conditioning to replace undesirable behaviors with socially acceptable behaviors.
- Token Economy
- A type of behavior modification system using tokens as secondary reinforcers.
- Tokens can be exchanged for a desired item or privilege.
- Effective in settings like:
- Schools
- Prisons
- Mental hospitals
- Example: Study by Cangi & Daly (2013):
- Autistic children received a “quiet hands” token for appropriate behavior.
- Tokens were taken away for inappropriate behavior (like hitting or pinching).
- Tokens could be exchanged for playtime.
- Result: Improved social behavior and reduced disruptive behavior.
- Example: Study by Cangi & Daly (2013):
- Effective in settings like:
- Time-Out as a Behavior Modification Technique
- Time-out- A form of negative punishment used to reduce undesirable behavior in children by removing them from a desirable activity or situation
- This removal decreases the likelihood that the behavior will happen again.
- Example:
-
- Sophia throws blocks at her brother.
- She is warned, repeats the behavior, and is then placed in time-out.
- After returning, she stops the unwanted behavior.
-
- Example:
- Key Principles for Effective Use of Time-Out
- Remove from Desirable Activity
- Time-out only works if the child is removed from something they enjoy
- If the activity is unpleasant, time-out may actually reinforce the child
- Time Duration
- Rule of thumb: 1 minute per year of age.
- Example: 5-year-old Sophia = 5-minute time-out.
- Use a timer to make the duration clear and predictable.
- Caregiver Guidelines
- Stay calm when issuing a time-out.
- Avoid giving the child attention during time-out
- After time-out, offer positive reinforcement (e.g., a hug or kind word).
- Time Duration
- Token Economy
- A technique that uses the principles of operant conditioning to replace undesirable behaviors with socially acceptable behaviors.
-
-
E. Reinforcement Schedules
-
-
-
Continuous Reinforcement
- The behavior is reinforced every time it occurs.
- Best for teaching new behaviors quickly
- Example: Dog gets a treat every time it sits
- Behavior may extinguish quickly if reinforcement stops.
- Partial (Intermittent) Reinforcement
- The behavior is reinforced only some of the time.
- Helps maintain behavior over time; more resistant to extinction
- Four Types of Partial Schedules (based on fixed/variable and interval/ratio):
- Types of Partial Schedules:
- Fixed Interval (FI)
- Reinforcement after a set amount of time.
- Example: Pain medication available once per hour after surgery.
- Behavior Pattern: Response increases as time for reward approaches.
- Extinction: Quick if reinforcement stops.
- Productivity: Low; quality may be better than quantity.
- Variable Interval (VI)
- Reinforcement after a varying number of responses.
- Example: Gambling—win after an unpredictable number of tries.
- Behavior Pattern: Very high and steady response rate.
- Extinction: Very resistant to extinction.
- Productivity: Highest among all schedules.
- Fixed Ratio (FR)
- Reinforcement after a set number of responses.
- Example: Sales commission for every pair of glasses sold.
- Behavior Pattern: High response rate; behavior increases with number of required responses.
- Extinction: Moderate.
- Productivity: High quantity, not necessarily quality.
- Variable Ratio (VR)
- Reinforcement after a varying number of responses.
- Example: Gambling—win after an unpredictable number of tries.
- Behavior Pattern: Very high and steady response rate.
- Extinction: Very resistant to extinction.
- Productivity: Highest among all schedules.
- Fixed Interval (FI)
- Types of Partial Schedules:
- Extinction of a reinforced behavior occurs when reinforcement is discontinued.
-
Resistance to Extinction – How long a behavior remains after reinforcement is discontinued.
- Four Types of Partial Schedules (based on fixed/variable and interval/ratio):
-
-
-
-
-
-
Schedule Type Based On Predictability Response Pattern Resistance to Extinction Continuous Every behavior Predictable Fast learning Low Fixed Interval (FI) Time Predictable Scalloped (response rate increases before reinforcement) Low Variable Interval (VI) Time Unpredictable Steady Moderate Fixed Ratio (FR) Responses Predictable High response rate (small break in responding after reinforcement) Moderate Variable Ratio (VR) Responses Unpredictable Very high & steady High (most resistant)
-
-
-
F. Cognition and Latent Learning
-
-
-
BF Skinner
- Only observable behavior should be studied
- Radical behaviorism – The mind is not scientifically measurable, so it’s excluded from research.
- Edward Tolman
- A behaviorist who challenged traditional views
- Proposed that learning can happen without immediate reinforcement—suggesting the role of cognition in learning
- Learning that isn’t immediately shown can surface when there is a need for it.
-
- Tolman’s Experiment
- Two groups of hungry rats were placed in a maze:
- one group was reinforced with food when they found the exit
- the other group was not reinforced when they found the exit
- after a few trials, the non-reinforced rats were then reinforced for finding the exit
- Outcomes:
- Once food was introduced, the non-reinforced rats navigated the maze just as quickly as the reinforced group
- They formed a cognitive map of the maze – a mental representation of a physical space.
- Learning can happen without immediate reinforcement which supports the role of cognition in learning
- Latent Learning – learning that isn’t immediately shown in behavior but appears when there’s a reason to use it.
- Human Example: A child learns a route by observation but only shows that knowledge when needed (e.g., biking to school alone for the first time).
- Outcomes:
- Two groups of hungry rats were placed in a maze:
- Tolman’s Experiment
-
-
-
4. Observational Learning (Modeling)
A. What is observational learning?
-
-
-
Observational learning – learning by watching others and imitating their behavior.
- Also called modeling
- Model -person being observed.
- Involves mirror neurons—special neurons that fire both when we act and when we observe others doing the same action.
- Examples:
- Claire’s daughter imitated Claire’s aggressive behavior by hitting a teddy bear with a belt.
- Chimps switched to sucking juice through straws after watching others do it more effectively.
- Albert Bandura & Social Learning Theory
- Learning includes cognitive processes—not just behavior and reinforcement.
- Developed Social Learning Theory to explain learning that happens without direct reinforcement.
- Types of Models (Bandura’s Model Types)
- Live – performs the behavior in person
- Verbal Instruction – describes the behavior using words
- Symbolic – media representations like books, movies, or games
- Albert Bandura & Social Learning Theory
-
-
B. Steps in the Modeling Process
-
-
- The Four Steps of Observational Learning (Bandura)
-
Step Description Example Attention Notice the model’s behavior Watching a teacher solve a math problem Retention Remember what was observed Remembering the steps to solve the same problem later Reproduction Ability to reproduce the behavior Solving a similar problem on your own Motivation Wanting to copy the behavior based on consequences seen Imitating a praised behavior but avoiding punished ones -
Vicarious Reinforcement: More likely to imitate if the model is rewarded.
- Vicarious Punishment: Less likely to imitate if the model is punished.
-
-
- Bandura’s Bobo Doll Experiment
- Children imitated adult aggression toward an inflatable doll.
- Children mimicked the behavior more when the model was not punished.
- Conclusion: We learn by watching consequences of others’ behavior.
- Effects of Observational Learning
- Prosocial – positive, helpful behavior learned through good role models
- Example: A child learns kindness by observing their parents acting kindly toward others
- Antisocial – negative, harmful behavior learned from poor models or media violence
- Example: An abused child grows up to be abusive
- Example: Media & Violence
- Studies suggest children exposed to violent TV/games may:
- Become more aggressive
- Become desensitized to violence
- Studies suggest children exposed to violent TV/games may:
- Prosocial – positive, helpful behavior learned through good role models
- The Four Steps of Observational Learning (Bandura)
-
Access for free at https://openstax.org/books/psycho ogy-2e/pages/1-introduction
unlearned knowledge, involving complex patterns of behavior; instincts are thought to be more prevalent in lower animals than in humans
unlearned, automatic responses by an organism to a stimulus in the environment
anything that can trigger a physical or behavioral change. The plural of stimulus is stimuli.
change in behavior or knowledge that is the result of experience
learning in which the stimulus or experience occurs before the behavior and then gets paired or associated with the behavior
stimulus that elicits a reflexive response
natural (unlearned) behavior to a given stimulus
natural (unlearned) behavior to a given stimulus
stimulus that elicits a response due to its being paired with an unconditioned stimulus
response caused by the conditioned stimulus
using a conditioned stimulus to condition a neutral stimulus
period of initial learning in classical conditioning in which a human or an animal begins to connect a neutral stimulus and an unconditioned stimulus so that the neutral stimulus will begin to elicit the conditioned response
a learned association between the taste of a particular food and illness such that the food is considered to be the cause of the illness
decrease in the conditioned response when the unconditioned stimulus is no longer paired with the conditioned stimulus
return of a previously extinguished conditioned response
ability to respond differently to similar stimuli
demonstrating the conditioned response to stimuli that are similar to the conditioned stimulus
form of learning in which the stimulus/experience happens after the behavior is demonstrated
behavior that is followed by consequences satisfying to the organism will be repeated and behaviors that are followed by unpleasant consequences will be discouraged
implementation of a consequence in order to increase a behavior
implementation of a consequence in order to decrease a behavior
adding a desirable stimulus to increase a behavior
taking away an undesirable stimulus to increase a behavior
adding an undesirable stimulus to stop or decrease a behavior
taking away a pleasant stimulus to decrease or stop a behavior
rewarding successive approximations toward a target behavior
has innate reinforcing qualities (e.g., food, water, shelter, sex)
has no inherent value unto itself and only has reinforcing qualities when linked with something else (e.g., money, gold stars, poker chips)
rewarding a behavior every time it occurs
rewarding behavior only some of the time
behavior is rewarded after a set amount of time
behavior is rewarded after unpredictable amounts of time have passed
set number of responses must occur before a behavior is rewarded
number of responses differ before a behavior is rewarded
staunch form of behaviorism developed by B. F. Skinner that suggested that even complex higher mental functions like human language are nothing more than stimulus-outcome associations
mental picture of the layout of the environment
learning that occurs, but it may not be evident until there is a reason to demonstrate it
type of learning that occurs by watching others
a neuron that fires both when an animal (including humans) acts and when the animal observes the same action performed by another. Thus, the neuron "mirrors" the behavior of the other, as though the observer were itself acting.
people who performs behaviors that serve as an example (in observational learning)
process where the observer sees the model rewarded, making the observer more likely to imitate the model’s behavior
process where the observer sees the model punished, making the observer less likely to imitate the model’s behavior
